Posts
-
Holyiot nRF54L15 Board mit DAP-Link flashen
HOLYIOT-24009-nRF54L15
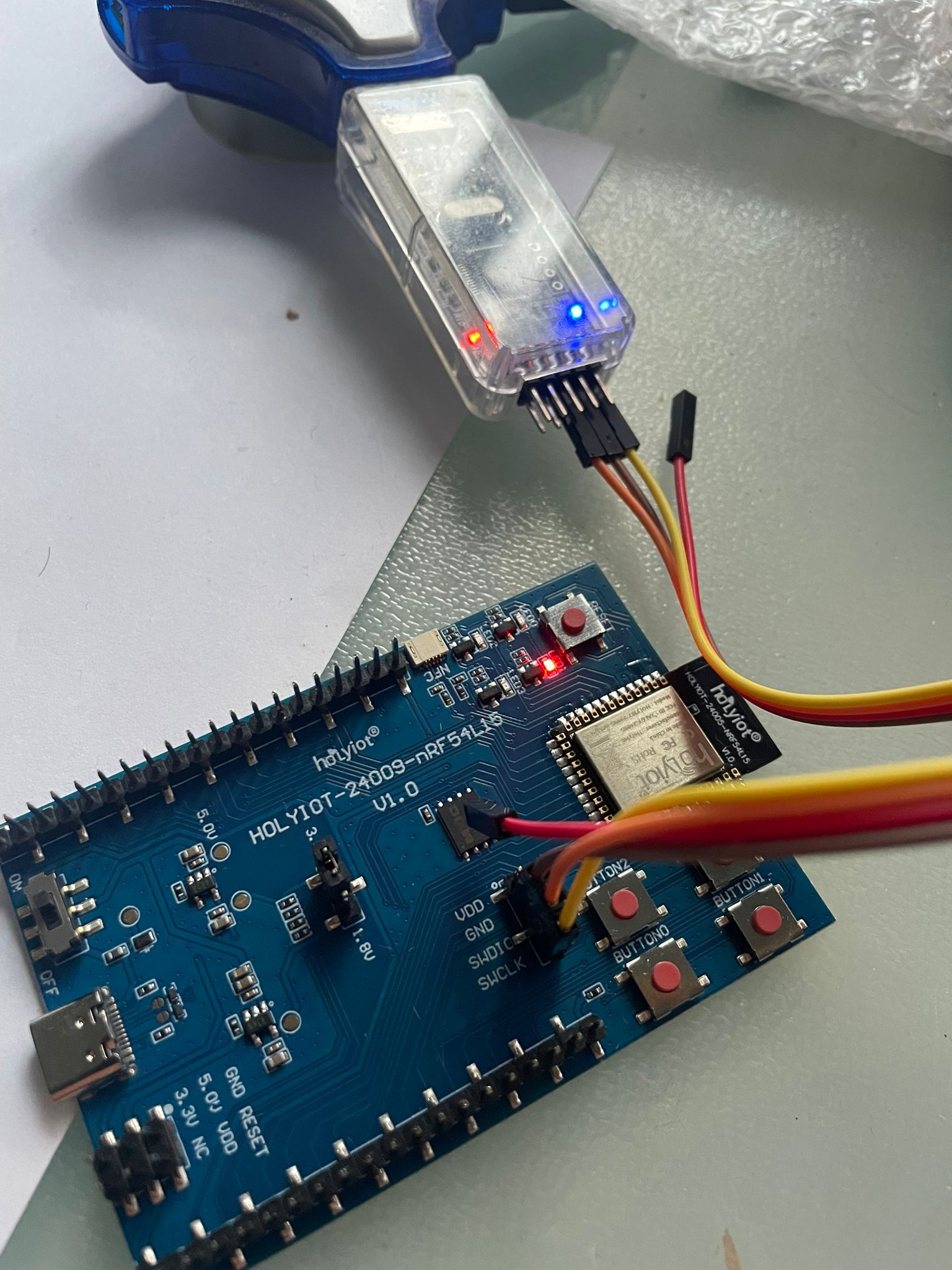
Seit Vorgestern liegt hier das “HOLYIOT-24009-nRF54L15” LowCost-Evalboard auf dem Schreibtisch. Es kann als preiswerte Alternative zum Nordic Semiconductor nRF54L15-DK Evalboard gesehen werden, da es sich für knapp 15EUR bei Aliexpress clicken läßt. Vorteil vom Original: es kommt direkt mit einem eingebauten JLink. Aber da west auch openocd unterstützt, läßt sich neben einem JLink auch ganz einfach ein günstiger DAPLink nutzen.
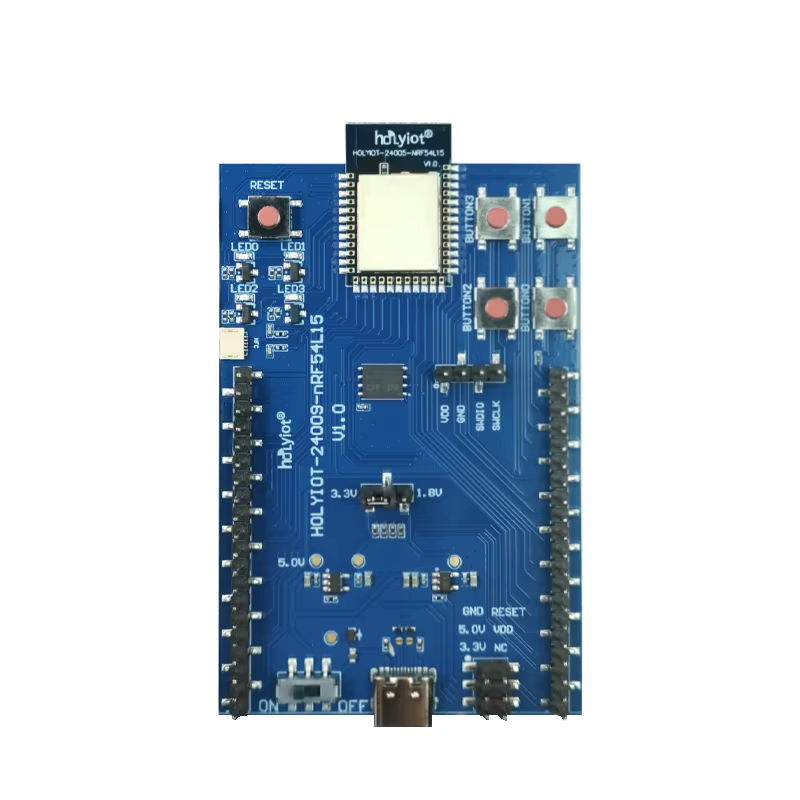
Das Holyiot DK Board nutzt anscheinend dieselbe Pinbelegung für die LEDs/Buttons, sodass sich die nrf54l15dk config um die fehlenden Zeilen für openocd erweitern lassen kann.
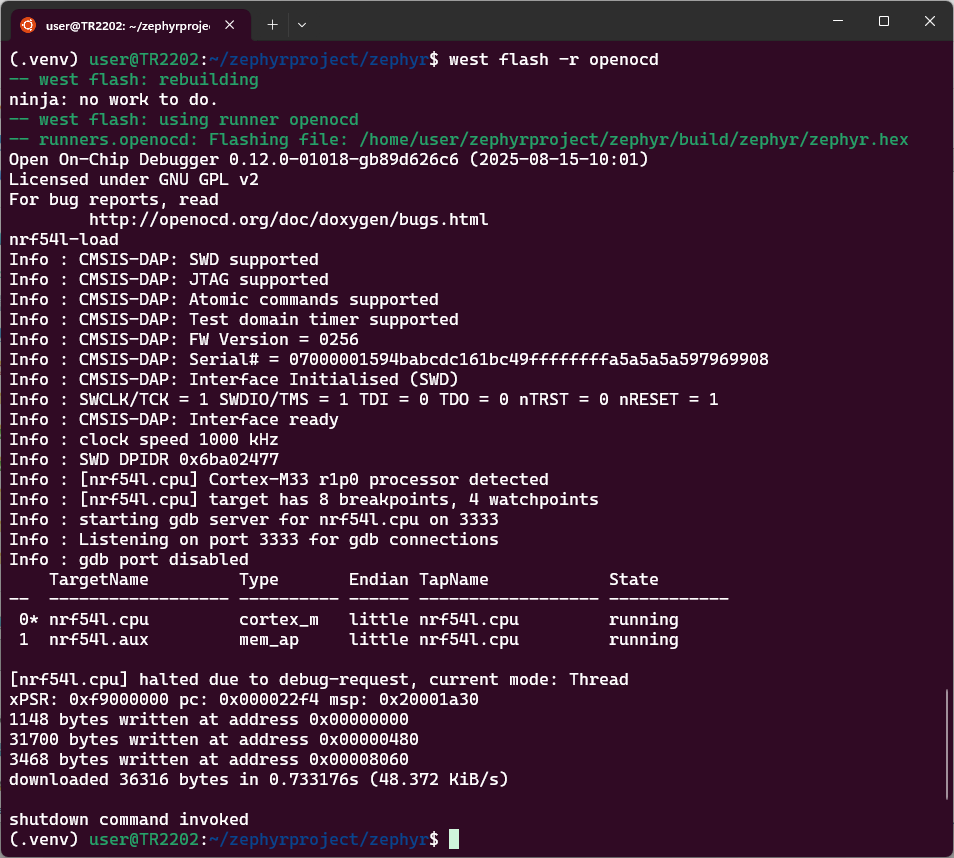
# 1. ein paar zeilen aus der board config ausleihen # zephyr/boards/seeed/xiao_nrf54l15/board.cmake # 2. und in der zephyr/boards/nordic/nrf54l15dk/board.cmake ergaenzen # Copyright (c) 2024 Nordic Semiconductor ASA # SPDX-License-Identifier: Apache-2.0 if(CONFIG_SOC_NRF54L05_CPUAPP OR CONFIG_SOC_NRF54L10_CPUAPP OR CONFIG_SOC_NRF54L15_CPUAPP) board_runner_args(openocd "--cmd-load=nrf54l-load" -c "targets nrf54l.cpu") board_runner_args(jlink "--device=nRF54L15_M33" "--speed=4000") elseif(CONFIG_SOC_NRF54L15_CPUFLPR) board_runner_args(openocd "--cmd-load=nrf54l-load" -c "targets nrf54l.aux") board_runner_args(jlink "--device=nRF54L15_RV32") elseif(CONFIG_SOC_NRF54L05_CPUFLPR OR CONFIG_SOC_NRF54L10_CPUFLPR) set(JLINKSCRIPTFILE ${CMAKE_CURRENT_LIST_DIR}/support/nrf54l_05_10_15_cpuflpr.JLinkScript) board_runner_args(jlink "--device=RISC-V" "--speed=4000" "-if SW" "--tool-opt=-jlinkscriptfile ${JLINKSCRIPTFILE}") endif() if(CONFIG_BOARD_NRF54L15DK_NRF54L15_CPUAPP_NS OR CONFIG_BOARD_NRF54L15DK_NRF54L10_CPUAPP_NS) set(TFM_PUBLIC_KEY_FORMAT "full") endif() if(CONFIG_TFM_FLASH_MERGED_BINARY) set_property(TARGET runners_yaml_props_target PROPERTY hex_file tfm_merged.hex) endif() include(${ZEPHYR_BASE}/boards/common/nrfutil.board.cmake) include(${ZEPHYR_BASE}/boards/common/jlink.board.cmake) include(${ZEPHYR_BASE}/boards/common/openocd.board.cmake) # 3. kompilieren wie üblich, zb west build -p always -b nrf54l15dk/nrf54l15/cpuapp samples/basic/fade_led # 4. flashen mit openocd west flash -r openocd -
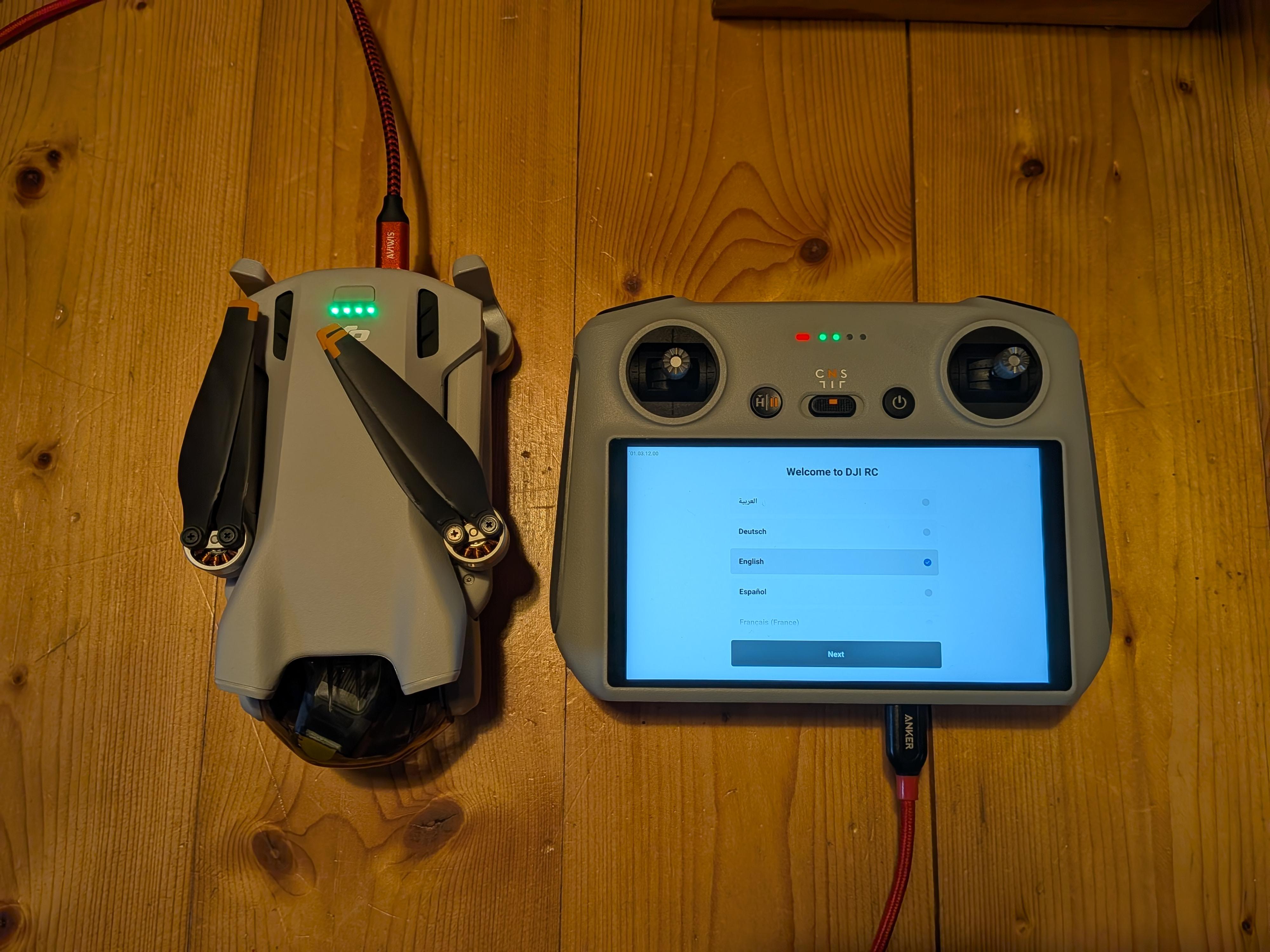
Gelandet und geladen
DJI Mini 3
Da ist sie nun die DJI Mini 3 und muss erstmal geladen werden, Registrierung, Software Updates, etc im Anschluss.
Morgen dann erster Flug!
-
Mehr Drohnen Content
DJI Mini 3
Ok, DJI Mini 3 ist bei Amazon bestellt! Das heißt es gibt hier demnächst Drohnen Content. Wieso die DJI Mini 3? Weil es die günstigste Drohne ist, die vom DJI zur Software Entwicklung unterstützt wird.
-
GDB/MI Interface
GDB/MI Interface
Das Python Package pygdbmi erlaubt es das GDB/MI Interface per Python zu skripten. Das könnte ganz interessant für Tests mit Mikrocontrollern sein. Im Repository befindet sich ein erster Test damit. Es wird eine Breakpoint gesetzt, das Programm gestartet und eine Variable on-the-fly verändert.
-
Mein erster Blogpost mit Jekyll
Mein erster Blogpost mit Jekyll
Okay, das hier ist mein erster Blogpost mit Jekyll – und ehrlich gesagt: es war viel einfacher als gedacht.
Ich hatte schon länger die Idee, etwas Eigenes aufzusetzen, ohne mich mit Datenbanken, riesigen Admin-Oberflächen oder unzähligen Plugins herumzuschlagen. Mit GitHub Pages und ein bisschen Markdown ist das Ganze super schnell eingerichtet.
subscribe via RSS